




| 厂家信息 | |||
|---|---|---|---|
| 变更(扩展)记录: | 第 403 批 第 401 批 第 399 批 第 397 批 第 395 批 | ||
| 车辆名称: | 纯电动厢式货车 | 公告型号: | JXW5040XXYWDJC2BEV |
| 公告批次: | 403 | 发布日期: | 20260209 |
| 产品号: | GBC403J1304 | 目录序号: | |
| 中文品牌: | 江西五十铃牌 | 底盘型号: | JXW1040WDJC2BEV |
| 企业名称: | 江西五十铃汽车有限公司 | 企业地址: | |
| 生产地址: | 江西省南昌市望城新区江铃大道666号 | ||
| 免检说明 | |||
| 免检: | 否 | 免检有效期止: | |
| 主要技术参数 | |||
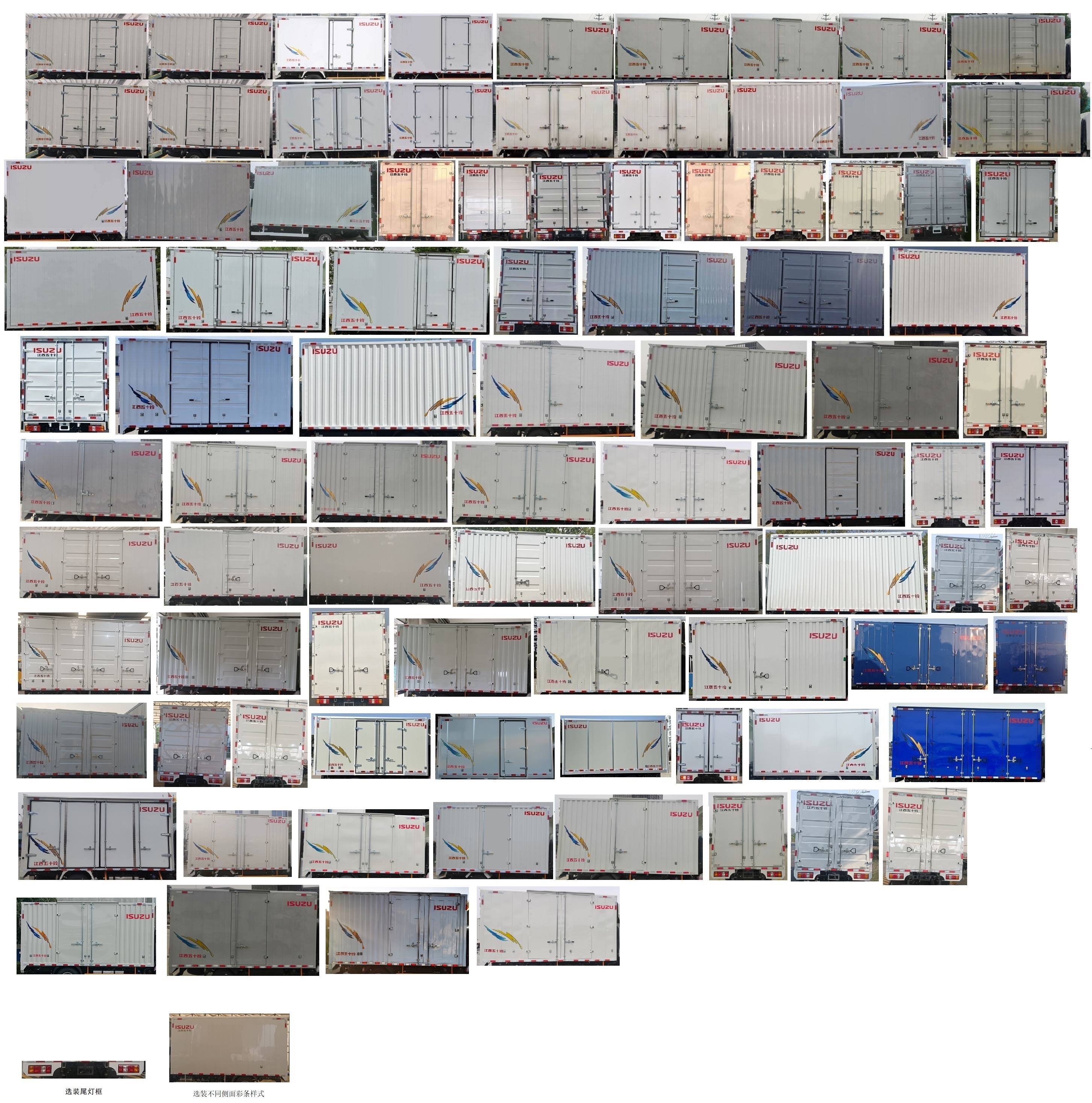
| 外形尺寸: | 5995×2020,2040,2140,2160,2180×2715,2750,2825,2860,2950,3085,3185,3220,3285,3320,3435,3470(mm) | 货厢尺寸: | 4200×2100,1980,1940×2450,2300,2200,2100,1930,1840,1730(mm) |
| 总质量: | 4495(Kg) | 载质量利用系数: | |
| 整备质量: | 3040(Kg) | 额定载质量: | 1325,1260(Kg) |
| 挂车质量: | (Kg) | 半挂鞍座: | |
| 驾驶室: | 前排乘客: | 2,3(人) | |
| 额定载客: | (人) | 防抱死系统: | |
| 接近角/离去角: | 20/15(°) | 前悬/后悬: | 1105/1530(mm) |
| 轴荷: | 1930/2565 | 轴距: | 3360(mm) |
| 轴数: | 2 | 最高车速: | 100(km/h) |
| 油耗: | (L/100Km) | 弹簧片数: | 2/3+2,2/2+1,3/2+2,4/3+3,7/5+6,3/3+2,3/5+2,3/5+6 |
| 轮胎数: | 6(个) | 轮胎规格: | 7.00R16LT 8PR,7.00R16LT 10PR |
| 前轮距: | 1565(mm) | 后轮距: | 1580(mm) |
| 制动前: | 制动后: | ||
| 制操前: | 制操后: | ||
| 转向形式: | 方向盘 | 起动方式: | |
| Vin车辆识别代码: | LA9CECG2×××LET××× | ||
| 发动机型号 | 发动机生产企业 | 排量(ml) | 功率(kw)/马力(ps) |
| TZ230XS001 | 博世汽车系统(无锡)有限公司 | 0 | 167/227 |
| 燃料种类: | 纯电动 | 依据标准: | |
| 底盘排放标准: | |||
| 1.车厢顶部封闭,不可开启。2.液刹ABS系统型号/生产厂家:3550A500/浙江亚太机电股份有限公司;气刹ABS系统型号/生产厂家:CM4XL-4S/4M/广州瑞立科密汽车电子股份有限公司。3.储能装置种类/生产企业:磷酸铁锂蓄电池/宁德时代新能源科技股份有限公司。4.驱动电机额定功率90kW,峰值功率167kW。5.可选装直接供电式ETC装置。6.后下部防护装置材料:HC700/980DP,连接方式:螺栓连接,断面尺寸:100mm×50mm,离地高度:385mm,405mm;侧防护材料:铝合金,蜂窝复合板,连接方式:螺栓连接。7.选装起重尾板,尾板收起状态的水平长度280mm,尾板质量为350kg,选装液压尾板时后下部防护装置材料:HC700/980DP,Q235,连接方式:螺栓连接,断面尺寸:100mm×50mm,Φ114mm,离地高度: 385mm,405mm。8.选装轮辋,选装不带车轮装饰罩,选装不带导流罩,选装不带内后视镜,选装不同货厢外观样式,选装铝合金轮辋,选装前示廓灯(安装在货厢上),选装不带前下视镜,选装不带前雾灯,选装侧防护。9.货厢材质可选装普通铁质/高强钢/彩钢板/蜂窝板/铝合金,对应的重量(kg):720/709/713/706/699,对应的侧板材质/厚度:(DC01钢:0.8mm,Q235钢:0.8mm)/(HC420LA钢:0.7mm)/(彩钢板:40mm)/(复合材料:17mm)/(6061铝合金:1mm),对应的底板材质/厚度:(DC01钢:1.2mm,Q235钢:1.2mm)/(HC420LA钢:1mm)/(Q235钢:3mm)/(Q235钢:3mm)/(6061铝合金:2mm)。10.整备质量不包含备胎、灭火器、随车工具、停车楔。11.可采用上装委托加装方式生产。 |
| 标识企业: | 浙江龙游道明光学有限公司 | 标识商标: | DM |
| 标识型号: | VCDM-4 | ||